
Investigadores de la Universidad Ben-Gurion del Negev han desarrollado un brazo robot liviano y de bajo costo que, según dicen, puede usarse para recoger fruta… o reparar satélites que funcionan mal.
El MASR multi-link arm-robot funciona como un robot serpiente tradicional, que generalmente está equipado con múltiples motores. El nuevo robot, sin embargo, usa solo dos motores: uno que viaja a lo largo del brazo para llevar el mecanismo de agarre a la ubicación correcta y otro que gira la articulación que necesita flexionarse.
Es muy parecido a los músculos de un brazo humano, explicó David Zarrouk, profesor del Department of Mechanical Engineering BGU y jefe del Laboratorio de Robótica Médica y Bioinspirada. Así como los músculos operan con articulaciones en el brazo, aquí los motores operan los enlaces en el brazo robótico. Pero en lugar de múltiples motores operando a lo largo del brazo, todos los enlaces son operados por un solo motor.
«Esta configuración minimalista única, que se puede aplicar a cualquier robot en serie con dos o más enlaces, reduce el peso, el tamaño y el costo», dijo Zarrouk. Permite que un manipulador robótico logre una amplia gama de movimientos usando pocos activadores o motores.
«Este robot es fácil de operar y probablemente tenga una serie de aplicaciones que incluyen el espacio, agricultura e industria, así como búsqueda y rescate», dijo.
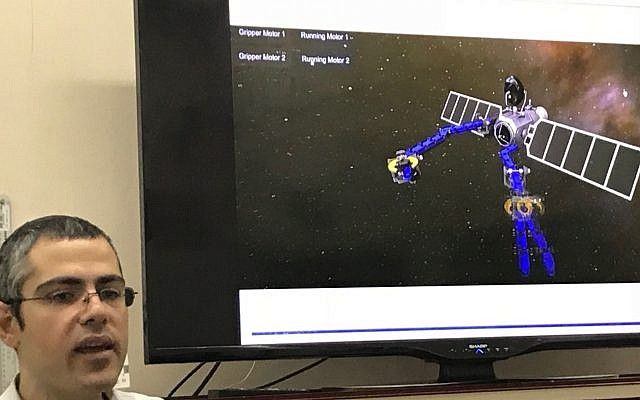
Su diseño es ideal para aplicaciones espaciales debido a su poco peso, y podría usarse para reparar satélites que funcionan mal, y para atracar o reabastecerse de combustible.
Un defecto es su velocidad. Pero el tiempo no es un problema en el espacio, dijo Zarrouk, en una presentación del robot en la universidad el lunes. «Las cosas se mueven lentamente en el espacio. Pero el peso es un problema, por lo que en realidad sería bueno para el espacio».
La velocidad es un problema, sin embargo, para la recolección de fruta, otra aplicación para la que podría usarse el robot. Para ser comercialmente viable, un robot debería cosechar frutos a una velocidad de unos 3 segundos por fruto, dijo Yael Edan, el jefe de la ABC Robotics Initiative de la universidad, que desarrolla robots inspirados en modelos biológicos y el comportamiento humano.
Los investigadores apenas completaron el segundo prototipo del brazo robot y todavía no lo han cronometrado recogiendo fruta, dijo Zarrouk. Sin embargo, debido al ligero peso de los brazos del robot, un vehículo podría estar equipado con múltiples brazos, lo que aceleraría el proceso.
En cualquier caso, los investigadores de BGU también están experimentando con la adición de motores para aumentar la velocidad.